
Faculty of Science
Department of Computer Science
Cognitive Systems Group
Department of Computer Science
Cognitive Systems Group
Event-Based Vision for Fast Robot Control
When a Table Tennis Robot meets Event-Based Vision
Andreas Ziegler
You can’t get enough of neuromorphic vision - Zürich Hackathon
ZHAW
2024-10-22
Our table tennis robot
Where it started (frame-based)

Our table tennis robot
The setup

Today’s talk
Fast-Moving Object Detection with Neuromorphic Hardware
Andreas Ziegler\(^1\), Karl Vetter\(^1\), Thomas Gossard\(^1\), Sebastian Otte\(^2\), and Andreas Zell\(^1\)
\(^1\) University of Tübingen, \(^2\) University of Lübeck
https://cogsys-tuebingen.github.io/snn-edge-benchmark/
Do you see the difference?
Visual Cortex:
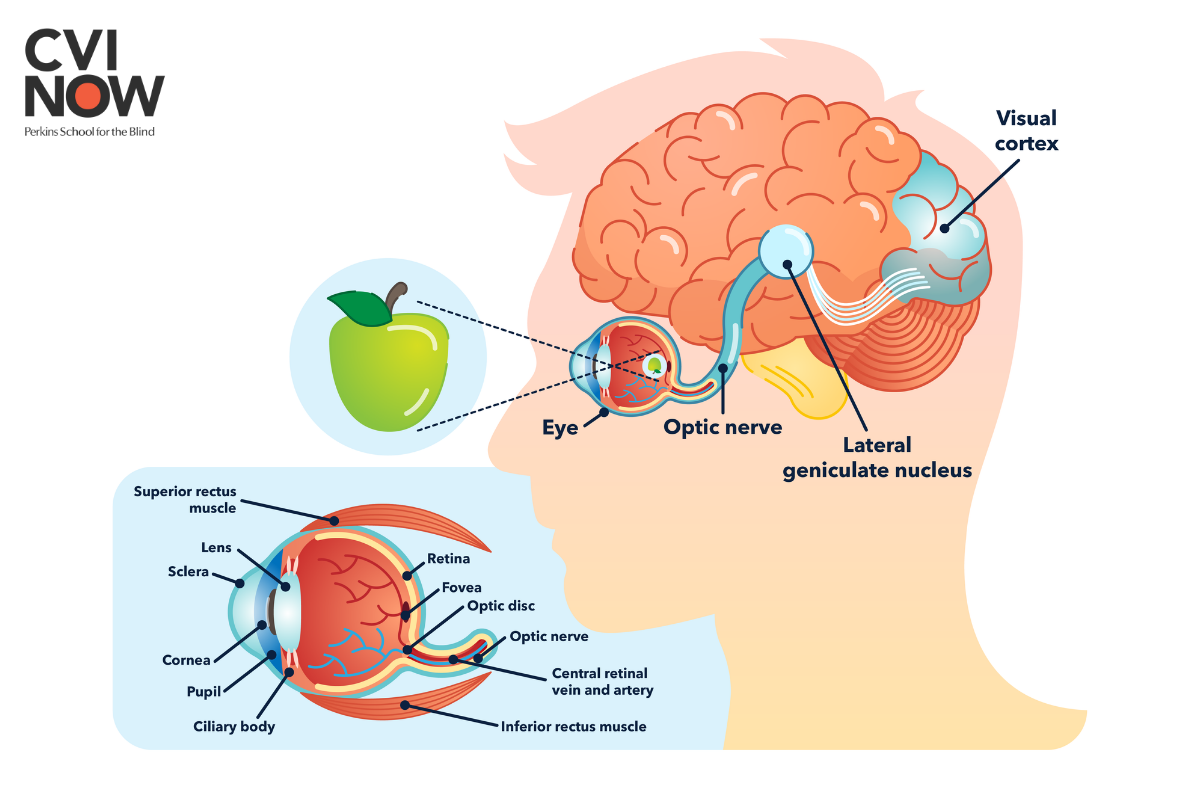
- Power consumption: 2-3 Watt
- Performance: \(10^{16}\) FLOPS
Neural Networks:

- Power consumption: 200-300 Watt
- Performance: \(10^{12}\) FLOPS
Neuromorphic Computing
The next generation of Neural Networks
Spiking Neural Networks:
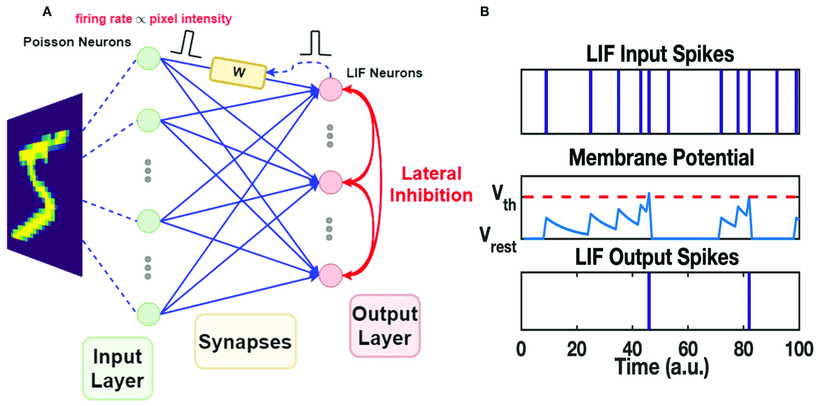
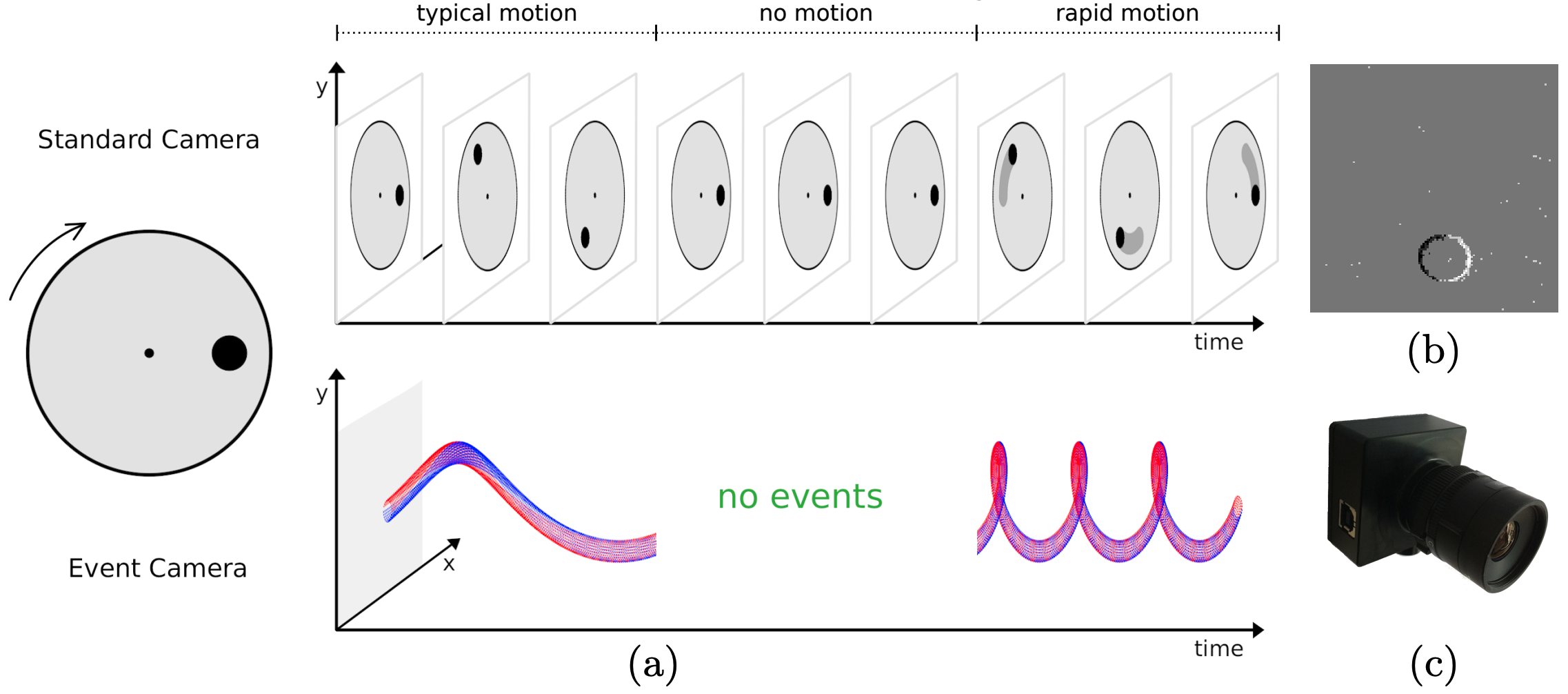
Event-Based Cameras:
Neuromorphic Computing
What \(>90\%\) of research is doing

Neuromorphic Computing
What \(>90\%\) of research is doing
But this is really inefficient

Neuromorphic Computing
for Robotics
Nice, but what about the specs?
DynapCNN Specs 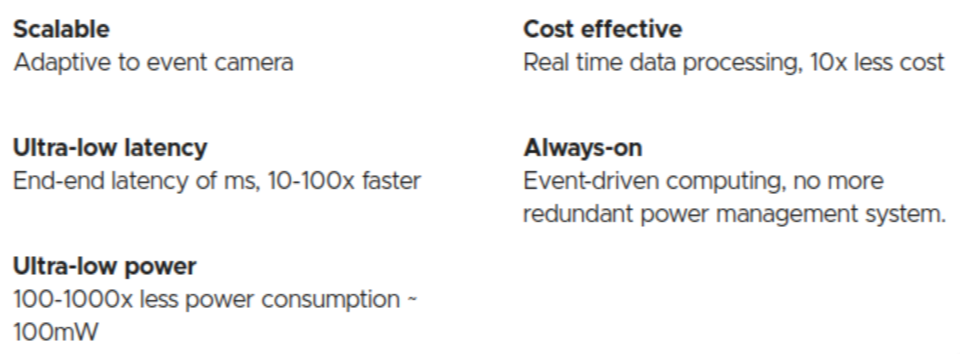
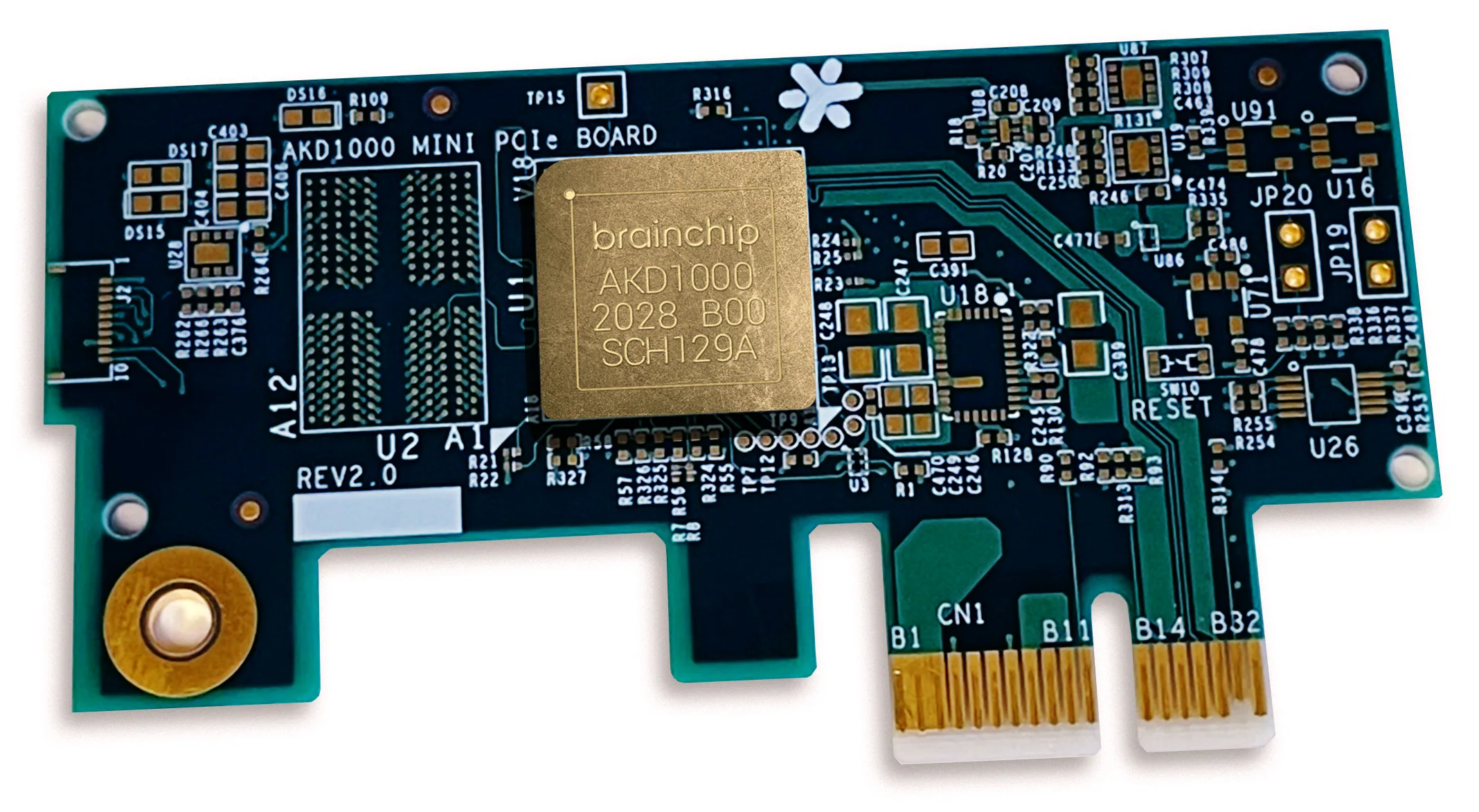
Akida Specs 
A Benchmark of NC Hardware
We compare…
- the inference time
- the time per forward pass
- the power consumption
of the
- SynSense DynapCNN
- BrainChip Akida
- Intel Loihi 2
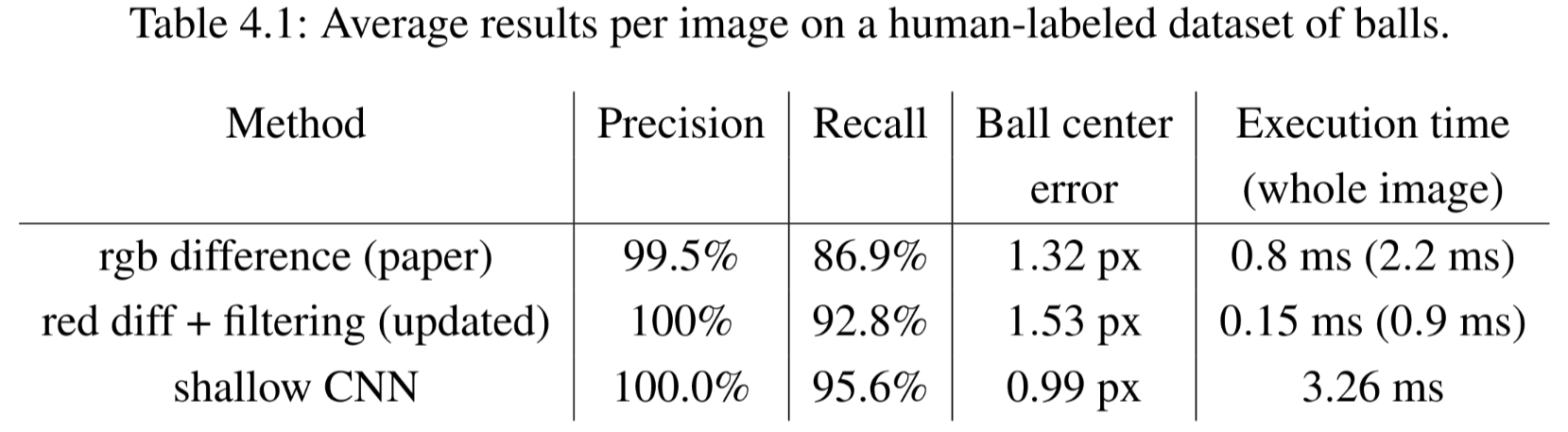
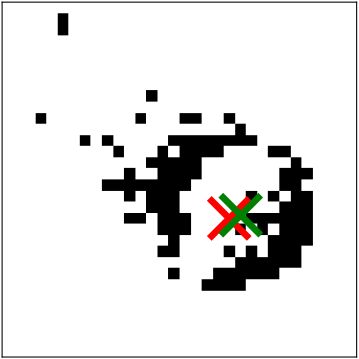
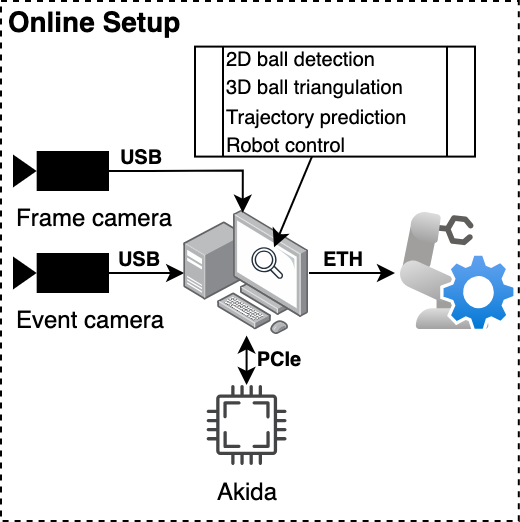
The benchmark task
Ball detection
The networks
Three SNN frameworks, three architectures …
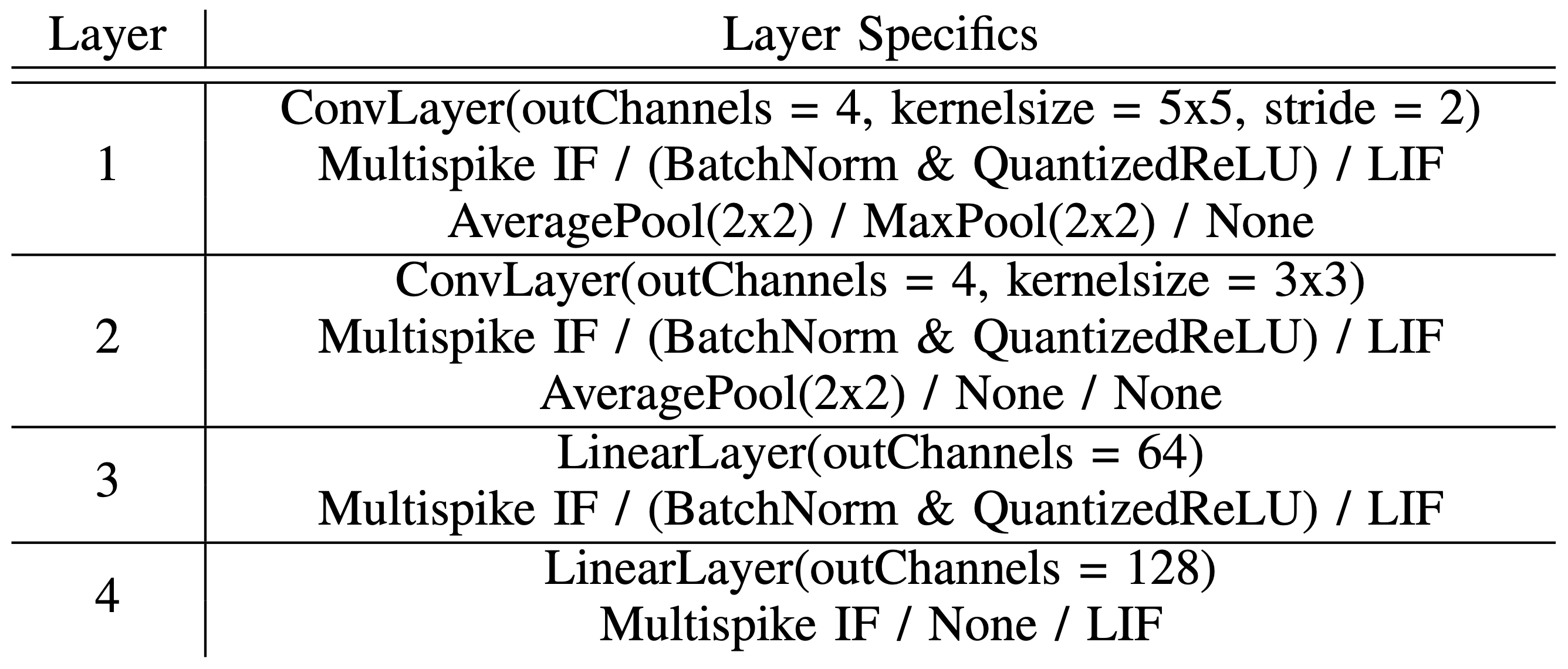
DynapCNN (sinabs) / Akida (MetaTF) / Loihi2 (Lava)
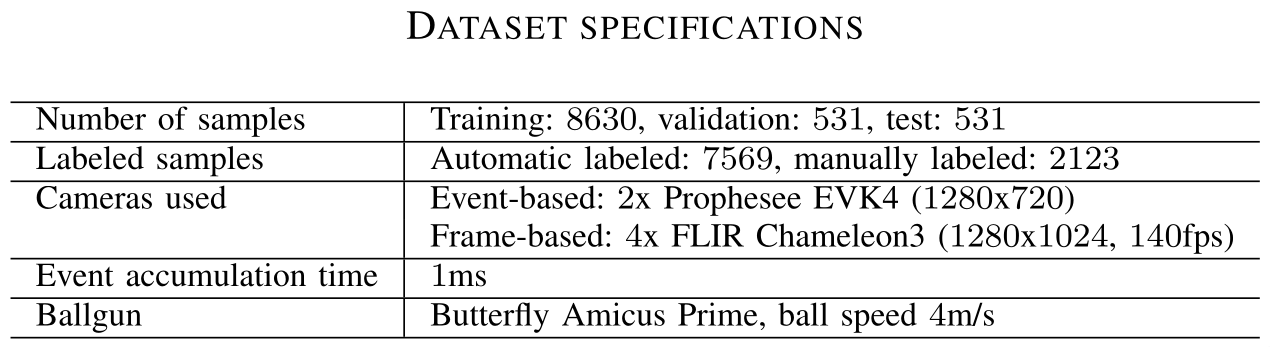
Machine Learning needs data

We project 3D points from the FB pipeline into the EB camera frame
Some more manual labeling
The benchmarking setup

The benchmarking results
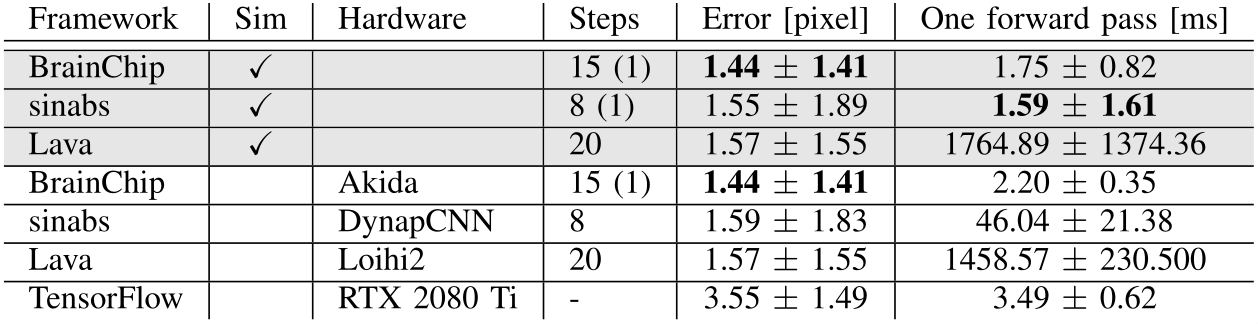
Let’s get into more detail

Note: Hardware integration matters!
Now to the (real) robotics part
Let’s stay in touch and collaborate

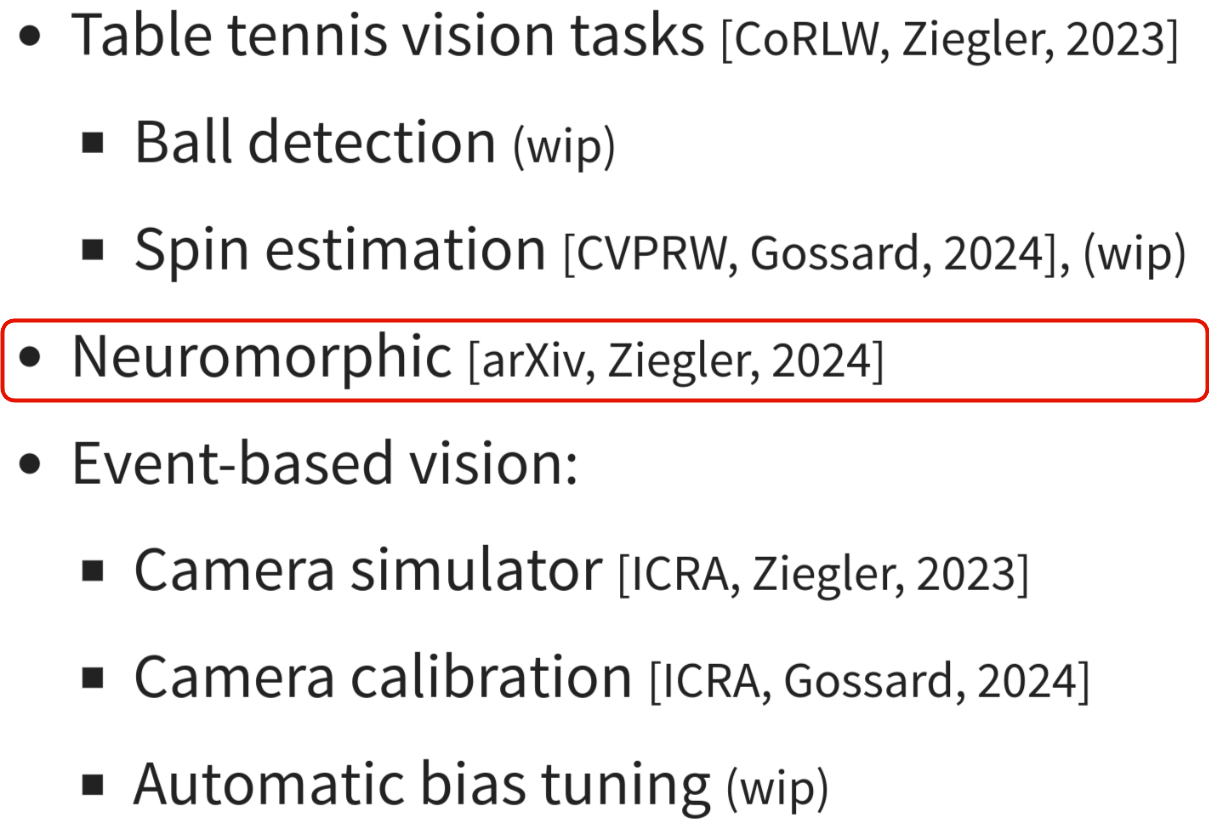
My topics:
- Real-time object detection
- Object detection in clutter
- Ball spin estimation
- Automatic bias optimization
- Event-based vision for tactile sensing
Email: andreas.ziegler@uni-tuebingen.de