Andreas Ziegler
Andreas Ziegler
Home
Publications
Teaching
Posts
Projects
Contact
Light
Dark
Automatic
Computer Vision
A multi-modal table tennis robot system
In recent years, robotic table tennis has become a popular research challenge for perception and robot control. Here, we present an …
Andreas Ziegler
,
Thomas Gossard
,
Karl Vetter
,
Jonas Tebbe
,
Andreas Zell
PDF
Cite
DOI
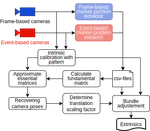
eWand: A calibration framework for wide baseline frame-based and event-based camera systems
Accurate calibration is crucial for using multiple cameras to triangulate the position of objects precisely. However, it is also a …
Thomas Gossard
,
Andreas Ziegler
,
Levin Komar
,
Jonas Tebbe
,
Andreas Zell
PDF
Cite
Code
Project
Video
DOI
Asynchronous Graph-based Neural Networks for Ball Detection with Event Cameras
The goal of this thesis is to apply these Graph-based networks for ball detection with event cameras.
Apr 21, 2023
Multi Object tracking via event-based motion segmentation with event cameras
The goal of this thesis is to develop a real-time capable (multi) object tracking pipeline by applying multi object segmentation.
Apr 21, 2023
A real-time event simulator
The goal of this project was to develop an event simulator which can run in real-time given a video stream from a frame-based camera.
PDF
Code
Ball Detection with event-based asynchronous sparse convolutional networks
The goal of this thesis is to use Asynchronous Sparse Convolutional Layers and apply it in a neural network to detect fast moving table tennis balls in real-time.
Feb 21, 2021
Spiking neural network for event-based ball detection
The goal of this thesis is to investigate and evaluate how a SNN can be used together with our event-based cameras to detect and track table tennis balls.
Feb 21, 2021
Map Fusion for Collaborative UAV SLAM
The goal of this project was to develop a pipeline to merge maps created by different Unmanned Aerial Vehicles (UAVs) operating in the same area.
PDF
Code
Robust object tracking in 3D by fusing ultra-wideband and vision
In this semester project a new object tracking approach is proposed. A fusion of Ultra-wideband (UWB) and visual measurements to track an object in 3D by fusing both modalities in a principled manner.
PDF
Code
Video
Cite
×