Abstract
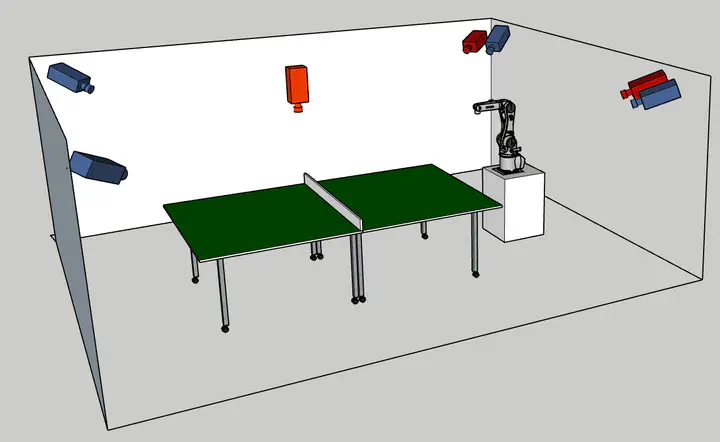
In recent years, robotic table tennis has become a popular research challenge for perception and robot control. Here, we present an improved table tennis robot system with high accuracy vision detection and fast robot reaction. Based on previous work, our system contains a KUKA robot arm with 6 DOF, with four frame-based cameras and two additional event-based cameras. We developed a novel calibration approach to calibrate this multimodal perception system. For table tennis, spin estimation is crucial. Therefore, we introduced a novel, and more accurate spin estimation approach. Finally, we show how combining the output of an event-based camera and a Spiking Neural Network (SNN) can be used for accurate ball detection.
Type
Publication
In CoRL 2023 RoboLetics Workshop